
鹏鼎微科技有限公司
I.高性能RISC CPU
A.增加到49条指令
B.指令周期可选:1T / 2T / 4T
C.存储架构
1.程序ROM: 8k x 14 bits
2.数据RAM: 1k x 8 bits
3.数据EEPROM: 256 x 8 bits
4.扇区程序代码保护(扇区=1k x 14bits)
5.支持IAP,VDD ≥ 2.7V
D.16层硬件堆栈
II.特殊单片机特性
A.工作温度范围:-40─85°C
B.宽工作电压范围:1.9─5.5V
1.DC – 8MHz: VDD ≥ 1.9V
2.DC – 16MHz: VDD ≥2.7V
C.时钟源
1.两个内部时钟
2.16M高速高精度HIRC
3.32k低速低功耗LIRC
4.晶体振荡器和外部时钟输入
5.晶体时钟缺失检测
6.晶体时钟配置下的双速时钟启动
7.慢时钟周期测量
D.带7位预分频的16位看门狗,时钟源可选
E.上电复位延时计数器
F.低功耗模式SLEEP
1.系统时钟可选择保持运行或关闭
G.低电压复位LVR:
1.2.0/2.2/2.5/2.8/3.1/3.6/4.1V
H.低电压检测LVD:
1.内部电压:2.0/2.4/2.8/3.0/3.6/4.0V
2.或检测外部输入,可当比较器用
I.支持ISP和在线调试OCD
1.3个硬件断点
2.软复位,单步,暂停,跳跃等
J.封装形式: SOP24, SSOP24, TSSOP24, SOP28, SSOP28, LQFP32
III.外设特性
A.GPIO
1.30个方向独立控制的通用IO
2.30个唤醒管脚:边沿或电平检测
3.30个带上拉功能的管脚,独立控制
4.30个带下拉功能的管脚,独立控制
5.ADC输入通道:AN0 - AN7
6.外部复位管脚:PC0
7.30个可编程源电流管脚:2/4/14/26mA@5V
8.30个可编程灌电流管脚:max. 62mA@5V
9.支持管脚第二功能的重映射
B.通信接口
1.UART
2.I2C,主从机
3.SPI,主从机
C.12 bit SAR ADC (x1)
1.8个外部通道+ 1个¼ VDD通道
2.内部参考电压:VDD, 0.5V, 2V, 3V
3.外部参考:VREFP, VREFN
4.手动和自动触发方式
5.支持延时触发
D.TIM1-16bit
1.带16位预分频的16位定时器
2.自动重载
3.时钟源:系统时钟,HIRC以及倍频时钟(晶体或HIRC的二倍频),LIRC
4.周期、占空比寄存器双缓冲设计
5.4个独立的捕捉/比较/PWM通道
6.PWM支持沿对齐,中心对齐,单次脉冲模式
7.3组带死区控制的互补PWM输出
8.前沿消隐
9.故障刹车控制
E.TIM2-16bit
1.带15位预分频的16位定时器
2.自动重载
3.时钟源:系统时钟,HIRC以及倍频时钟(晶体或HIRC的二倍频),LIRC
4.周期、占空比寄存器双缓冲设计
5.3个独立的捕捉/比较/PWM通道
F.TIM4-8bit,带8bit预分频的基本定时器,
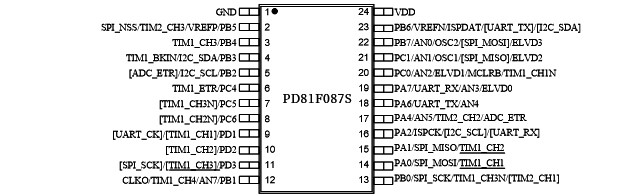
SOP24脚位
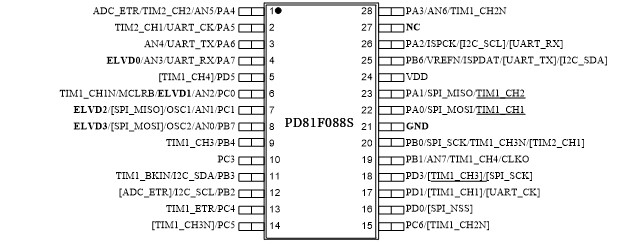
SOP28脚位
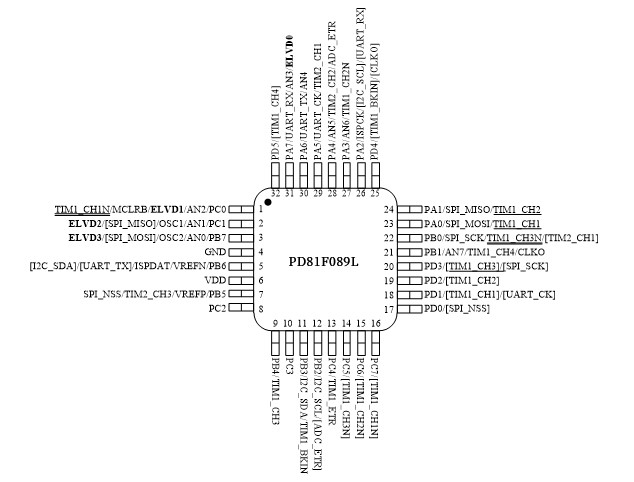
LQFP32脚位
以下为芯片管脚的详细描述:
|
LQFP32 |
Pin name |
Type |
INT input |
HS output |
Main func. |
Default AF |
|
1 |
PC0/AN2/MCLRB/TIM1_CH1N/ELVD1 |
IO |
√ |
√ |
PC0 |
TIM1_CH1N |
|
2 |
PC1/AN1/OSC1/[SPI_MISO]/ELVD2 |
IO |
√ |
√ |
PC1 |
SPI_MISO |
|
3 |
PB7/AN0/OSC2/[SPI_MOSI]/ELVD3 |
IO |
√ |
√ |
PB7 |
SPI_MOSI |
|
4 |
GND |
Ground |
— |
— |
Ground |
|
|
5 |
PB6/ISPDAT/[I2C_SDA]/[UART_TX] |
IO |
√ |
√ |
PB6 |
I2C_SDA |
|
6 |
VDD |
Supply |
— |
— |
Power |
|
|
7 |
PB5/TIM2_CH3/SPI_NSS |
IO |
√ |
√ |
PB5 |
TIM2_CH3 |
|
8 |
PC2 |
IO |
√ |
√ |
PC2 |
— |
|
9 |
PB4/TIM1_CH3 |
IO |
√ |
√ |
PB4 |
TIM1_CH3 |
|
10 |
PC3 |
IO |
√ |
√ |
PC3 |
— |
|
11 |
PB3/I2C_SDA/TIM1_BKIN |
IO |
√ |
√ |
PB3 |
I2C_SDA |
|
12 |
PB2/I2C_SCL/[ADC_ETR] |
IO |
√ |
√ |
PB2 |
I2C_SCL |
|
13 |
PC4/TIM1_ETR |
IO |
√ |
√ |
PC4 |
TIM1_ETR |
|
14 |
PC5/[TIM1_CH3N] |
IO |
√ |
√ |
PC5 |
TIM1_CH3N |
|
15 |
PC6/[TIM1_CH2N] |
IO |
√ |
√ |
PC6 |
TIM1_CH2N |
|
16 |
PC7/[TIM1_CH1N] |
IO |
√ |
√ |
PC7 |
TIM1_CH1N |
|
17 |
PD0/[SPI_NSS] |
IO |
√ |
√ |
PD0 |
SPI_NSS |
|
18 |
PD1/[TIM1_CH1]/[UART_CK] |
IO |
√ |
√ |
PD1 |
TIM1_CH1 |
|
19 |
PD2/[TIM1_CH2] |
IO |
√ |
√ |
PD2 |
TIM1_CH2 |
|
20 |
PD3/[TIM1_CH3]/[SPI_SCK] |
IO |
√ |
√ |
PD3 |
TIM1_CH3 |
|
21 |
PB1/TIM1_CH4/CLKO/AN7 |
IO |
√ |
√ |
PB1 |
TIM1_CH4 |
|
22 |
PB0/SPI_SCK/TIM1_CH3N/[TIM2_CH1] |
IO |
√ |
√ |
PB0 |
SPI_SCK |
|
23 |
PA0/SPI_MOSI/TIM1_CH1 |
IO |
√ |
√ |
PA0 |
SPI_MOSI |
|
24 |
PA1/SPI_MISO/TIM1_CH2 |
IO |
√ |
√ |
PA1 |
SPI_MISO |
|
25 |
PD4/[TIM1_BKIN]/[CLKO] |
IO |
√ |
√ |
PD4 |
TIM1_BKIN |
|
26 |
PA2/ISPCK/[I2C_SCL]/[UART_RX] |
IO |
√ |
√ |
PA2 |
I2C_SCL |
|
27 |
PA3/AN6/TIM1_CH2N |
IO |
√ |
√ |
PA3 |
AN6 |
|
28 |
PA4/AN5/TIM2_CH2/ADC_ETR |
IO |
√ |
√ |
PA4 |
AN5 |
|
29 |
PA5/VREF/UART_CK/TIM2_CH1 |
IO |
√ |
√ |
PA5 |
UART_CK |
|
30 |
PA6/UART_TX/AN4 |
IO |
√ |
√ |
PA6 |
UART_TX |
|
31 |
PA7/UART_RX/AN3/ELVD0 |
IO |
√ |
√ |
PA7 |
UART_RX |
|
32 |
PD5/[TIM1_CH4] |
IO |
√ |
√ |
PD5 |
TIM1_CH4 |
注意:
INT input:中断输入;HS output:可编程灌电流输出
Main func:管脚主要功能
Default AF:管脚第二功能映射